Системы компьютерного зрения — тысяча и один способ использовать их в промышленности и сельском хозяйстве.
Компьютерное зрение уже применяется регулярно и повсеместно — от бытовых задач и AI-ассистентов до сложных производственных процессов. Во всех областях производства можно найти процесс, ускорить или улучшить который можно с помощью моделей с компьютерным зрением.
Для примера можно взглянуть на статистику по применению компьютерного зрения в одном только машиностроении Великобритании и Германии. Компании используют компьютерное зрение одинаково часто по шести направлениям: детекция пор, метрология, проверка наличия, замеры приборов, трекинг деталей, инспекция качества. 56% компаний в Великобритании и 43% в Германии используют ту или иную форму искусственного интеллекта. Хотя далеко не все удовлетворены — 17-18% компаний ожидали большего.
Удивительно, но 24% британских и 34% немецких компаний вообще не используют ИИ ни в какой форме. Это довольно большой разрыв, который, вероятно, должен сказаться на конкурентности рынка.
В России к 2023 году планировался рост рынка компьютерного зрения с 7 до 38 млрд. На производственный сектор по прогнозу должно было приходиться 17%. Этого не случилось — в 2022 объем оценивался в только 17 миллиардов. Но всё же спрос растет, особенно с уходом зарубежных вендоров.
Как именно внедрить модель с computer vision — задача, ограниченная почти только фантазией. Расскажем о некоторых примерах из самых разных областей.
Поиск зараженных тюльпанов

Голландская H2L Robotics создала робота для детекции больных тюльпанов прямо на грядке на основе компьютерного зрения. Особенность проекта в том, что классифицировать зараженный патогеном цветок нужно на ранних стадиях, когда признаки совсем не явные. Речь идёт о крошечных и неочевидных несоответствиях: немного другой цвет, немного другая форма или размер. Обучить такую систему на стандартных данных тяжело, понадобилась крупная собственная база данных и множество экспертов. Поэтому проект представляют именно как коллаборацию с фермерами (и назвали робота в честь одного из бывших сотрудников тюльпановой фермы — Тео).
После того как зараженный цветок найден, Тео удаляет луковицу из земли, чтобы остановить распространение вируса. Робот обходится владельцам ферм в $200,000 — недёшево, но, видимо, окупаемо, так как Тео трудится уже не на одной голландской ферме.
Перемещение грузов на складе
Еще одно роботизированное решение для складов и других больших заводских помещений. Автономный погрузчик Flexley Tug родился из швейцарского стартапа Sevensense, который специализировался на visual SLAM. Робот использует SLAM, а это означает, что он не боится перестановок, движения, коллег-людей и другой динамики на складе — позиционирование происходит одновременно с построением карты.
Flexley Tug различает статичные и подвижные объекты в динамической среде и сам принимает решения. Кстати, объемный SLAM увеличил скорость робота на 20% по сравнению с 2D алгоритмом. Текущая версия Flexley Tug может поднять до 2 тонн, точность позиционирования составляет 5 мм. Также создатели предусмотрели возможность запуска сразу нескольких погрузчиков, правда погрешность в таком случае будет в два раза выше.
Инспекция солнечных батарей
Во многих приложениях нужно обеспечить связь в условиях отсутствия связи (на закрытых складах, под землёй и так далее). Но вот интересный случай с диаметрально противоположной стороны этого вопроса — робот-инспектор солнечных батарей, который может работать из (почти) любой точки планеты, потому что подключается к Starlink. Задача этого краулера — детекция точек перегрева на солнечных панелях. Обычно большие солнечные фермы расположены на удалении от инфраструктуры и вообще цивилизации. Поэтому такие локации тоже могут оказаться “не в сети”. Альтернативный вариант — инспекция с помощью дронов, но он даёт возможность обнаружить перегрев только на поверхности панелей. Этот же краулер проверяет все детали конструкции. Дополнительный и логичный бонус — робот и сам питается от солнечной батареи, то есть автономен практически полностью.
Сбор урожая

Израильский стартап Tevel использует систему автономных дронов для сбора фруктов. Выглядит это как с картинок, которые рисовали люди в начале прошлого века, вроде “как через сто лет будут выглядеть сады”: вдоль рядов фруктовых деревьев едет машина и на чем-то вроде поводков ведёт с собой несколько дронов. У каждого дрона есть небольшая труба, похожая на клюв колибри. Этот “клюв” вакуумом подтягивает спелые фрукты и проворачивает их — так фрукт без повреждения оказывается у дрона. Затем он несёт свою добычу в центральную машину.
Из необычного тут, конечно, проводное питание (те самые “поводки”) — невиданная роскошь для других задач, но здесь грех было бы не воспользоваться. Ориентируются дроны с помощью компьютерного зрения и ИИ. Пока всё это происходит не быстрее, чем ручной сбор, но зато в режиме 24/7
Другой пример из Швейцарии —. робот-сборщик от ETH Zurich осматривает плоды, находит зрелые с помощью компьютерного зрения, а после обработки создает 3D траекторию для манипулятора, чтобы срезать нужную ветку. За ним следует “прицеп”, который меняет полные ящики на пустые. Этот процесс тоже автоматизирован.
Еще одна приятная особенность: Beerstecher AG — не крупный агрокомплекс, а небольшой семейный бизнес. То есть технически сложная автоматизация — это не удел крупных компаний, а что-то доступное (и нужное) мелкому и среднему бизнесу. После теплиц Beerstecher, авторы специально под эту разработку создали Floating Robotics, чтобы выходить с ней на рынок. Получается своего рода “инновация снизу”.
Видео-взвешивание свиней
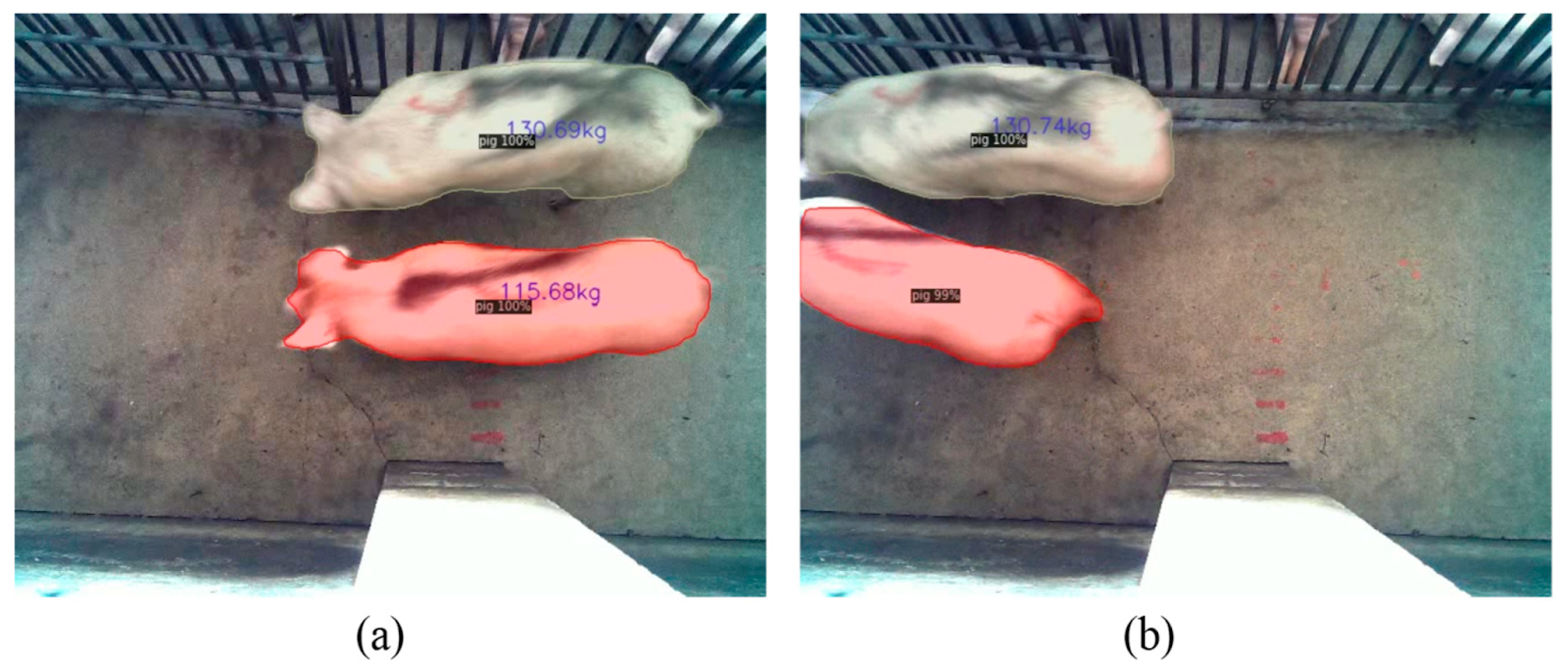
В Южно-китайском сельскохозяйственном университете научились определять вес свиней по камерам, установленным в коридоре перед убойным цехом. Модель компьютерного зрения определяет отдельных особей и оценивает вес по снимкам сверху. Главное, что всё это происходит не в закрытом загоне, а в движении — за 0,34 секунды.
Поэтому фермерам будет удобно быстро распределить свиней по весу в разные загоны на скотобойне. Среднеквадратичная ошибка составила 3,52 кг, то есть около 3% от средней массы взрослой свиньи.
Точность подойдет не для всех задач (например, для контроля набора веса это слишком грубо), но для финального взвешивания достаточно.